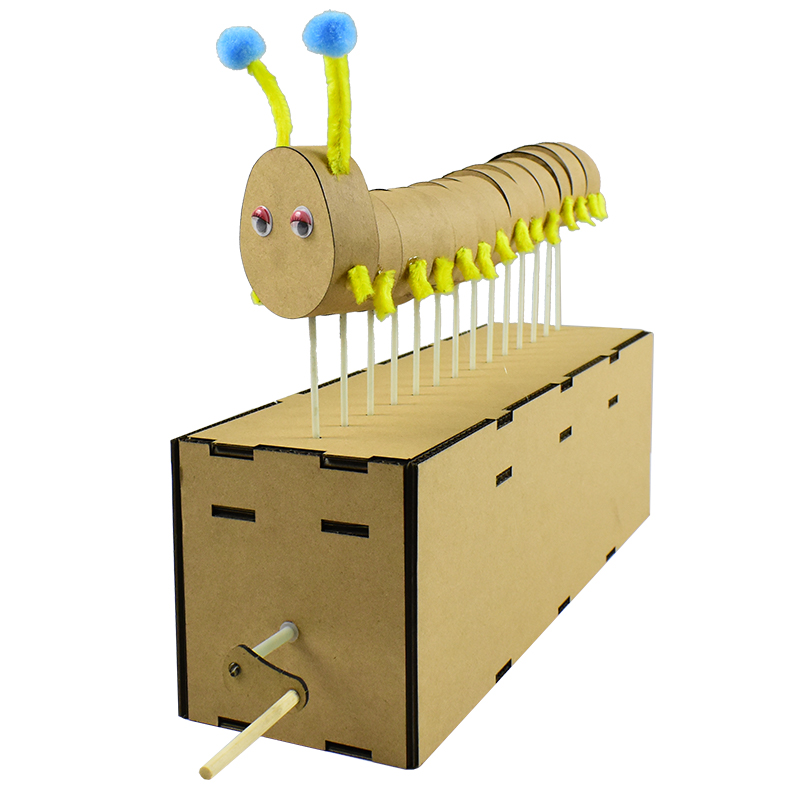
当制作一个能够直立行走的机器人时,我们需要用到很多有趣的知识。就像在玩积木一样,我们要把各种零件拼接在一起,才能让机器人动起来
在制作基于双凸轴马达的直立行走机器人的过程中,涉及了丰富的机械运动和工程知识,从设计凸轮轮廓到优化连杆长度,再到实际装配调试,每一步都充满了挑战和乐趣。以下是制作过程中所能学到的关键知识点以及机器人的组件结构和各部分工作原理:
学到的关键知识点
机械结构设计: 学习如何设计机器人的结构,包括连杆、凸轮和腿部部件。理解不同形状和长度的连杆如何影响机器人的步态和稳定性。
凸轮运动分析: 通过研究凸轮的轮廓和马达的旋转,掌握如何分析凸轮的运动特性,预测连杆的上下运动轨迹。
电动马达选择: 了解电动马达的工作原理和性能参数,学会选择合适的马达以提供足够的扭矩和速度。
机械装配和调试: 学习如何将设计的部件进行装配,如何调整和校准机器人的各个部件,确保机器人的运动平稳和稳定。
实践技能: 在实际制作过程中,锻炼切割、钻孔、组装等机械操作技能,提高实际动手能力。
组件结构
双凸轴马达: 每个马达轴上安装一个凸轮,用于控制机器人腿部的抬腿和落腿动作。
凸轮: 凸轮是一个轮盘状零件,分别安装在双凸轴马达的轴上。一个凸轮的轮廓使连杆抬腿,另一个凸轮的轮廓使连杆落腿。
连杆: 连杆连接在凸轮上,通过凸轮的运动使得机器人的腿部部件产生上下运动。
腿部部件: 腿部部件由大腿、小腿和脚组成,连接在连杆的末端。它们通过连杆的上下运动实现抬腿和落腿的动作。
工作原理
双凸轴马达旋转: 两个电动马达同时启动,开始旋转。每个马达轴上的凸轮也开始旋转。
凸轮运动: 一个凸轮的轮廓会随着马达轴的旋转使连杆抬起,另一个凸轮的轮廓会使另一个连杆落下。
连杆传递运动: 凸轮的运动通过连杆传递到机器人的腿部部件。连杆的上下运动影响了腿部部件的运动状态。
抬腿和落腿动作: 连杆的上升运动将抬起机器人的腿部部件,连杆的下降运动将腿部部件放下。
步行模仿: 两个凸轮和连杆的协调运动使得机器人的腿部能够交替地抬起和放下,从而实现直立行走的步态。
在整个制作过程中,您不仅可以学到机械运动和工程设计的知识,还能够培养解决问题的能力、实际操作技能以及团队合作意识。最终,您将创造出一个能够模仿直立行走的机器人,这将成为您在机械工程领域的宝贵经验,为将来的创新和设计项目提供了坚实的基础。
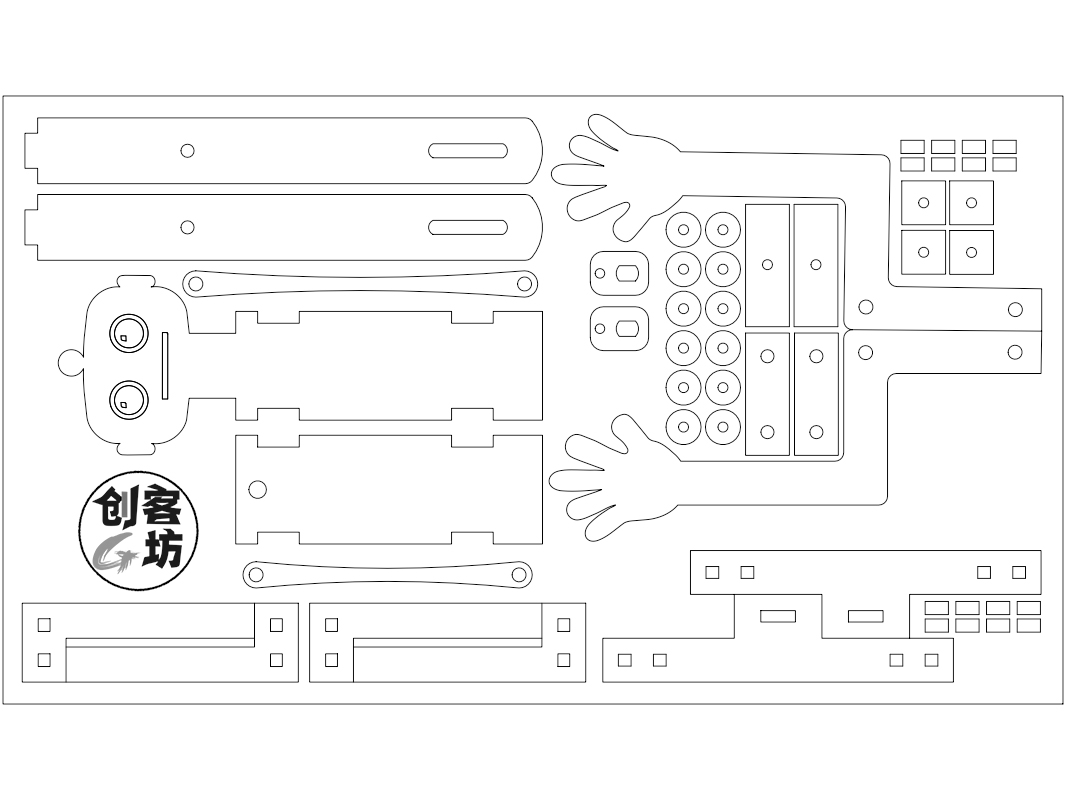
图纸参考